


Giới thiệu về vật liệu PEEKCảm biến Robot
PEEK (Polyether Ether Ketone) là một loại nhựa kỹ thuật chuyên dụng hiệu suất cao với các đặc tính như khả năng chịu nhiệt độ cao (nhiệt độ hoạt động lâu dài khoảng 240°C), chống ăn mòn hóa học, độ bền cao, trọng lượng nhẹ, hệ số ma sát thấp và khả năng cách điện tuyệt vời. Những ưu điểm này khiến PEEK trở thành vật liệu lý tưởng cho các thành phần chính của cảm biến robot, khắc phục những nhược điểm của cảm biến kim loại hoặc nhựa thông thường về độ chính xác, độ ổn định và khả năng thích ứng với môi trường.
I. Các loại ứng dụng cốt lõi và đặc điểm
Vật liệu PEEK chủ yếu được sử dụng để chế tạo các thành phần cấu trúc lõi hoặc nền chức năng của cảm biến. Các ứng dụng phổ biến bao gồm:
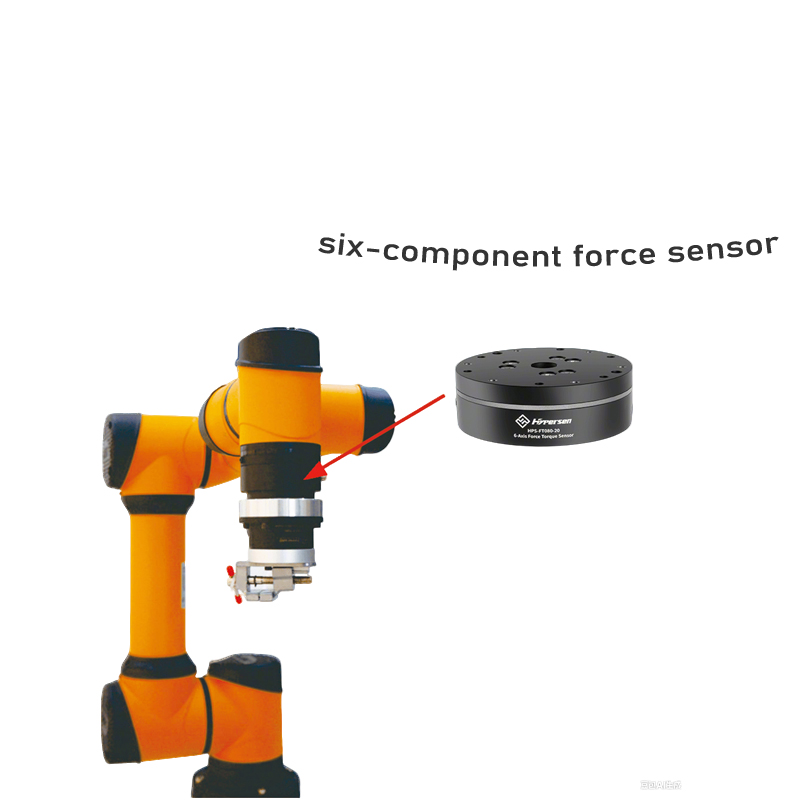
1. Cảm biến lực/mô-men xoắn sáu chiều
Bộ phận ứng dụng: Thân đàn hồi (thành phần cốt lõi để nhận tín hiệu lực) của cảm biến.
Giá trị cốt lõi: Các vật thể đàn hồi truyền thống chủ yếu được làm bằng hợp kim nhôm, trong khi PEEK có tỷ lệ mô đun đàn hồi trên mật độ tốt hơn - đảm bảo độ bền kết cấu đồng thời giảm đáng kể khối lượng của vật thể đàn hồi, giảm thiểu nhiễu quán tính trong quá trình chuyển động của robot và cải thiện độ chính xác đo lực (lên đến ±0,1% FS) và tốc độ phản hồi động (thời gian phản hồi < 1ms).
Các tình huống điển hình: Lắp ráp rô-bốt công nghiệp (chẳng hạn như điều khiển lực siết vít chính xác), tương tác giữa người và máy trong rô-bốt cộng tác (chẳng hạn như nhận thức lực va chạm), phản hồi lực phẫu thuật của rô-bốt y tế (chẳng hạn như theo dõi lực mài bề mặt xương trong rô-bốt chỉnh hình).

2. Cảm biến xúc giác/biến dạng
Bộ phận ứng dụng: Đế mềm hoặc giá đỡ điện cực của cảm biến.
Giá trị cốt lõi: PEEK có độ linh hoạt và khả năng chống mỏi nhất định, cho phép gia công thành các hình dạng mỏng hoặc không đều, phù hợp với các tình huống tiếp xúc cong hoặc linh hoạt như ngón tay robot và kẹp; đồng thời, khả năng cách điện của nó có thể ngăn chặn nhiễu tín hiệu, đảm bảo tính ổn định của dữ liệu xúc giác (như áp suất, nhận dạng kết cấu) hoặc dữ liệu biến dạng (như biến dạng khớp).
Các tình huống điển hình: Nhận thức áp suất ở robot dịch vụ khi cầm nắm các vật dễ vỡ (như thủy tinh, trái cây), theo dõi ứng suất để lắp ráp linh hoạt robot công nghiệp.
3. Cảm biến chuyên dụng cho môi trường ăn mòn
Bộ phận ứng dụng: Vỏ, ống bảo vệ đầu dò hoặc các thành phần tiếp xúc của cảm biến.
Giá trị cốt lõi: PEEK có khả năng chống axit, kiềm, dung môi hữu cơ và hơi nước ở nhiệt độ cao (như làm sạch CIP trong ngành công nghiệp thực phẩm) cực kỳ mạnh, vượt trội hơn nhiều so với thép không gỉ hoặc nhựa thông thường, giúp bảo vệ các bộ phận bên trong của cảm biến khỏi bị ăn mòn và kéo dài tuổi thọ sử dụng.
Các tình huống điển hình: Cảm biến mức chất lỏng/nồng độ trong robot thực phẩm/y tế (chẳng hạn như theo dõi mức chất lỏng trong thùng đựng nước sốt), cảm biến thông số môi trường trong robot hóa học (chẳng hạn như bảo vệ đầu dò phát hiện khí ăn mòn).
II. Ưu điểm cốt lõi so với vật liệu truyền thống

III. Các lĩnh vực ứng dụng điển hình
Robot công nghiệp: Kiểm soát lực lắp ráp, phản hồi lực nghiền, giám sát áp lực kẹp;
Robot y tế: Cảm nhận lực của dụng cụ phẫu thuật (như phản hồi lực trong phẫu thuật nội soi), theo dõi độ căng khớp của robot phục hồi chức năng;
Robot đặc biệt: Cảm biến môi trường chống ăn mòn trong lĩnh vực thực phẩm/hóa chất, cảm biến nhiệt độ/lực trong điều kiện nhiệt độ cao (như hàn ô tô).











