



Bộ giảm tốc RV robot PEEK là thiết bị giảm tốc có độ chính xác cao, ứng dụng vật liệu composite PEEK (Polyether Ether Ketone) vào cấu trúc truyền động RV (Rotary Vector), kết hợp độ cứng cao của bộ giảm tốc RV với ưu điểm nhẹ của vật liệu PEEK. Sau đây là phần giới thiệu về cải tiến kết cấu, đặc tính vật liệu, chỉ số hiệu suất và các tình huống ứng dụng:
I. Đổi mới cấu trúc
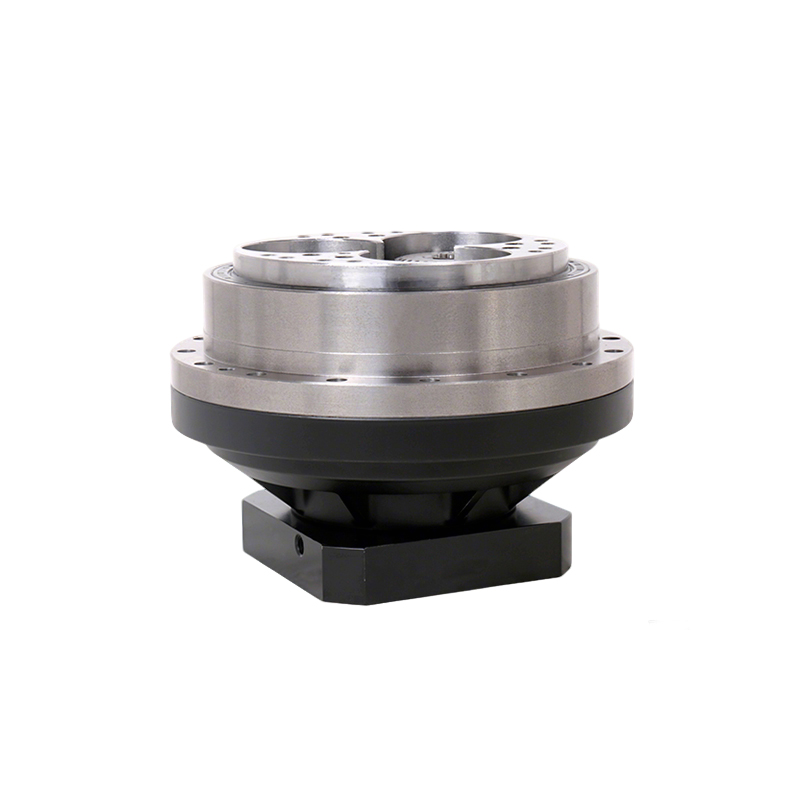
Nó sử dụng cấu trúc giảm tốc hai giai đoạn: giai đoạn đầu tiên là giảm tốc bánh răng hành tinh (bánh răng mặt trời + 3 bánh răng hành tinh), và giai đoạn thứ hai là giảm tốc bánh xe cycloidal (2 bánh xe cycloidal có độ lệch pha 180°). Trong các thành phần truyền động cốt lõi, bánh xe cycloidal được làm bằng khuôn phun PEEK gia cố sợi carbon 30%, chốt răng chốt là cấu trúc composite kim loại PEEK (lớp chống mài mòn PEEK ở bên ngoài + trục lõi thép), và vỏ ổ trục lệch tâm tích hợp ống lót tự bôi trơn PEEK, cho phép hoạt động lâu dài mà không cần dầu. Cấu trúc tổng thể được tối ưu hóa thông qua cấu trúc phần tử hữu hạn, giảm 25% số lượng bộ phận so với bộ giảm tốc RV thép truyền thống.

II. Tính chất vật liệu
Ưu điểm về tỷ lệ sức bền/trọng lượng: Độ bền kéo của bánh xe cycloid PEEK đạt 180MPa, với mật độ chỉ 1,45g/cm³, giảm 55% trọng lượng so với bánh xe cycloid thép. Đồng thời, độ bền uốn của chân răng được tăng 40% nhờ thiết kế định hướng sợi carbon.
Hiệu suất động: Hệ số giảm chấn vật liệu là 0,02 (0,001 đối với thép), giảm tiếng ồn truyền tải từ 15-20dB và tăng tần số cộng hưởng lên hơn 3000Hz.
Khả năng thích ứng với môi trường: Duy trì các đặc tính cơ học ổn định trong phạm vi nhiệt độ từ -60°C đến 220°C, có khả năng chống ăn mòn bởi dầu thủy lực và dầu bánh răng, đáp ứng các yêu cầu về cấp độ bảo vệ IP67.

III. Các chỉ số hiệu suất cốt lõi
Độ chính xác truyền động: Độ rơ ≤ 15 giây cung, độ chính xác định vị lặp lại ±5 giây cung, độ biến động mô-men xoắn khởi động không tải ≤ 3%.
Khả năng chịu tải: Mô-men xoắn đầu ra định mức 80-300N・m (tương ứng với các model RV-40 đến RV-110), hệ số quá tải ngắn hạn gấp 2,5 lần.
Hiệu suất và tuổi thọ: Hiệu suất truyền động 94%-96% (ở tốc độ 2000 vòng/phút), MTBF (Thời gian trung bình giữa các lần hỏng hóc) lên tới 20.000 giờ (trong điều kiện định mức).
IV. Các tình huống ứng dụng điển hình
Robot hình người: Các bộ phận chịu tải trọng lớn như khớp xoay eo và khớp gối, chẳng hạn như bộ truyền động khớp hông của Tesla Optimus (yêu cầu bộ giảm tốc loại 200N・m).
Robot công nghiệp: Trục J2/J3 của cánh tay cơ khí sáu trục, thay thế bộ giảm tốc hài hòa truyền thống để đạt được độ cứng cao hơn.
Thiết bị cao cấp: Robot xử lý wafer bán dẫn, robot phẫu thuật, cần đáp ứng đồng thời các yêu cầu về độ chính xác định vị ở cấp độ micron và trọng lượng nhẹ.











